




Jeden fotónInGaAs fotodetektor
S rýchlym rozvojom LiDARu,detekcia svetlaTechnológia a technológia merania dosahu používaná na automatické sledovanie vozidiel má tiež vyššie požiadavky, citlivosť a časové rozlíšenie detektora používaného v tradičnej technológii detekcie slabého osvetlenia nedokážu splniť skutočné potreby. Jeden fotón je najmenšou energetickou jednotkou svetla a detektor so schopnosťou detekcie jedného fotónu je posledným nástrojom na detekciu slabého osvetlenia. V porovnaní s InGaAs...APD fotodetektorJednofotónové detektory založené na fotodetektore InGaAs APD majú vyššiu rýchlosť odozvy, citlivosť a účinnosť. Preto sa doma aj v zahraničí uskutočnila séria výskumov jednofotónových detektorov IN-GAAS APD fotodetektorov.
Výskumníci z Milánskej univerzity v Taliansku prvýkrát vyvinuli dvojrozmerný model na simuláciu prechodného správania jedného fotónu.lavínový fotodetektorv roku 1997 a poskytli výsledky numerickej simulácie prechodových charakteristík lavínového fotodetektora s jedným fotónom. Potom v roku 2006 výskumníci použili MOCVD na prípravu planárneho geometrickéhoInGaAs APD fotodetektordetektor jedného fotónu, ktorý zvýšil účinnosť detekcie jedného fotónu na 10 % znížením reflexnej vrstvy a zosilnením elektrického poľa na heterogénnom rozhraní. V roku 2014, ďalším zlepšením podmienok difúzie zinku a optimalizáciou vertikálnej štruktúry, mal detektor jedného fotónu vyššiu účinnosť detekcie, až o 30 %, a dosahoval časové chvenie približne 87 ps. V roku 2016 SANZARO M a kol. integrovali fotodetektorový detektor jedného fotónu InGaAs APD s monolitickým integrovaným rezistorom, navrhli kompaktný modul počítania jedného fotónu založený na detektore a navrhli hybridnú metódu zhášania, ktorá výrazne znížila lavínový náboj, čím sa znížilo presluchovanie po impulze a optické presluchy a znížilo časové chvenie na 70 ps. Zároveň aj iné výskumné skupiny vykonali výskum InGaAs APD.fotodetektordetektor jednotlivých fotónov. Napríklad Princeton Lightwave navrhol detektor jednotlivých fotónov InGaAs/InPAPD s planárnou štruktúrou a uviedol ho do komerčného využitia. Šanghajský inštitút technickej fyziky testoval výkon fotodetektora APD s jednotlivými fotónmi pomocou odstránenia zinkových usadenín a kapacitného režimu vyváženého hradlového impulzu s počtom tmavého impulzu 3,6 × 10⁻⁴/ns pri frekvencii impulzov 1,5 MHz. Joseph P a kol. navrhli detektor jednotlivých fotónov fotodetektora InGaAs APD s meza štruktúrou a širším zakázaným pásmom a ako absorpčný vrstvový materiál použili InGaAsP na dosiahnutie nižšieho počtu tmavého impulzu bez ovplyvnenia účinnosti detekcie.
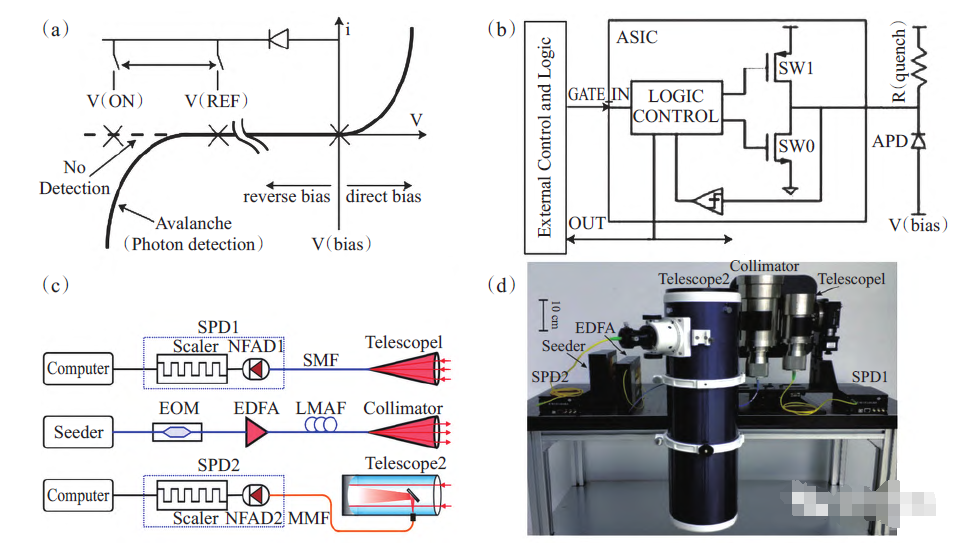
Prevádzkový režim jednofotónového fotodetektora InGaAs APD je režim voľnej prevádzky, to znamená, že APD fotodetektor musí po lavíne zhasnúť periférny obvod a po zhasnutí sa na určitý čas zotaviť. Aby sa znížil vplyv oneskorenia zhasnutia, zhruba sa delí na dva typy: prvým je použitie pasívneho alebo aktívneho zhasovacieho obvodu na dosiahnutie zhasnutia, ako napríklad aktívny zhasovací obvod používaný R Thew atď. Obrázok (a), (b) je zjednodušená schéma elektronického riadenia a aktívneho zhasovacieho obvodu a jeho zapojenia s APD fotodetektorom, ktorý bol vyvinutý na prácu v hradlovanom alebo voľnom režime, čím sa výrazne znižuje predtým nerealizovaný problém s následným impulzom. Okrem toho je účinnosť detekcie pri 1550 nm 10 % a pravdepodobnosť následného impulzu je znížená na menej ako 1 %. Druhým je dosiahnutie rýchleho zhasnutia a zotavenia riadením úrovne predpätia. Keďže to nezávisí od spätnoväzbovej regulácie lavínového impulzu, čas oneskorenia zhasnutia sa výrazne skracuje a účinnosť detekcie detektora sa zlepšuje. Napríklad LC Comandar a kol. používajú hradlovaný režim. Bol pripravený hradlovaný jednofotónový detektor založený na InGaAs/InPAPD. Účinnosť detekcie jedného fotónu bola pri 1550 nm viac ako 55 % a dosiahla sa pravdepodobnosť post-pulzu 7 %. Na tomto základe Univerzita vedy a techniky v Číne vytvorila systém liDAR s použitím multimódového vlákna súčasne prepojeného s voľným módom InGaAs APD fotodetektora s jedným fotónom. Experimentálne zariadenie je znázornené na obrázku (c) a (d) a detekcia viacvrstvových oblakov s výškou 12 km sa realizuje s časovým rozlíšením 1 s a priestorovým rozlíšením 15 m.
Čas uverejnenia: 7. mája 2024